About
Our Vision
We, team DeGra, began Principles of Engineering with a mission to create an autonomous robotic hand capable of manipulating a variety of objects with appropriate grip strength. The project idea drew us in for its extensive real-life applications and potential depth for technical exploration.
Over the past eight weeks, we have challenged ourselves to dive deep into the engineering concepts behind mechanical, software, and electrical components of robotic hands. After many pivots, extensive physics discussions, and long nights by the whir of 3D printers, we present you with Tenacity.
Tenacity
Tenacity is a hybrid tendon-driven system with both active and passive actuation. It has three fingers and an opposable thumb, each of which can be independently controlled to achieve a variety of gripping configurations. Compliant fingertips mean that the hand shapes to whatever object it holds. Tenacity is autonomous. With infrared and piezoelectric sensors, the hand is capable of detecting both when an object is within grasping range and how far to move before stopping for optimal grip performance.
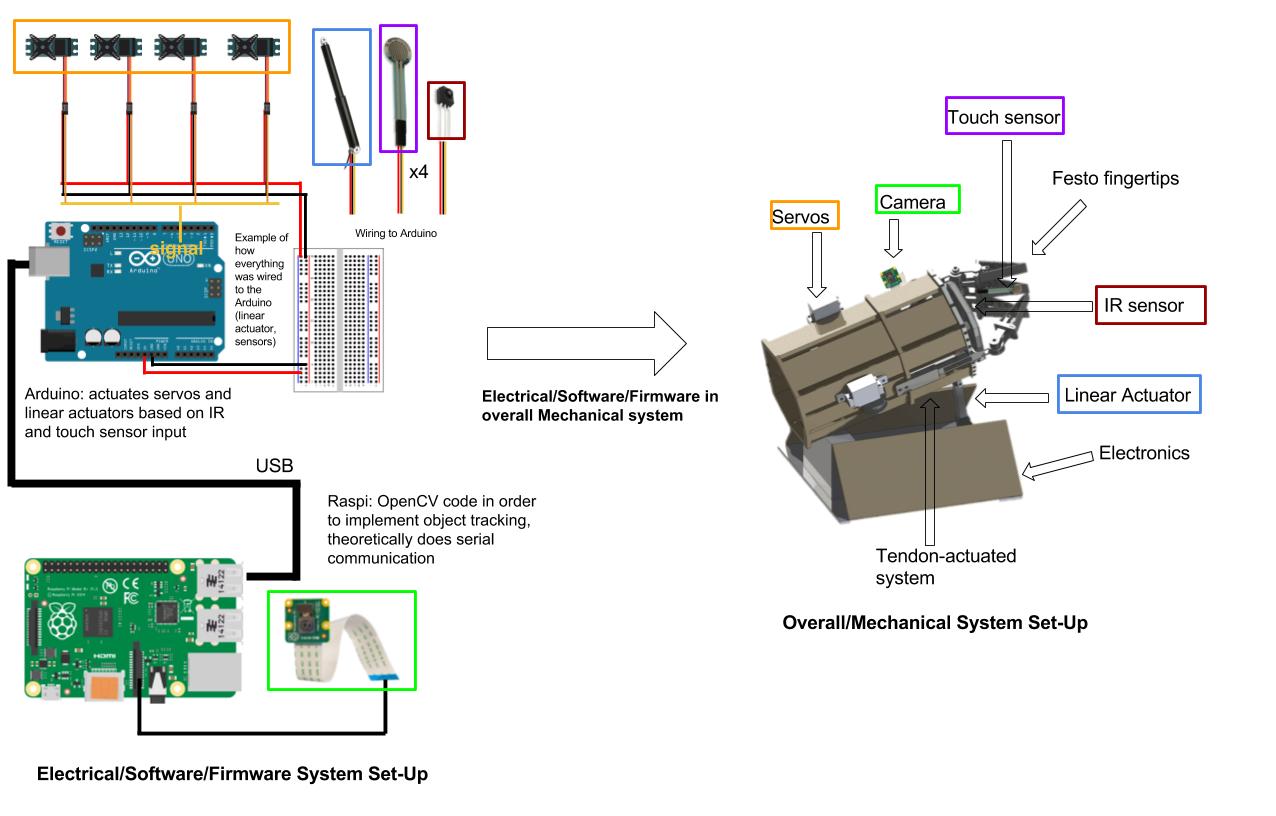
For a detailed breakdown of Tenacity in its final state, refer to the Mechanical, Software, and Electrical subsystem pages. For a peek into our process, and the hand’s many iterations over the past several weeks, head over to our blog!
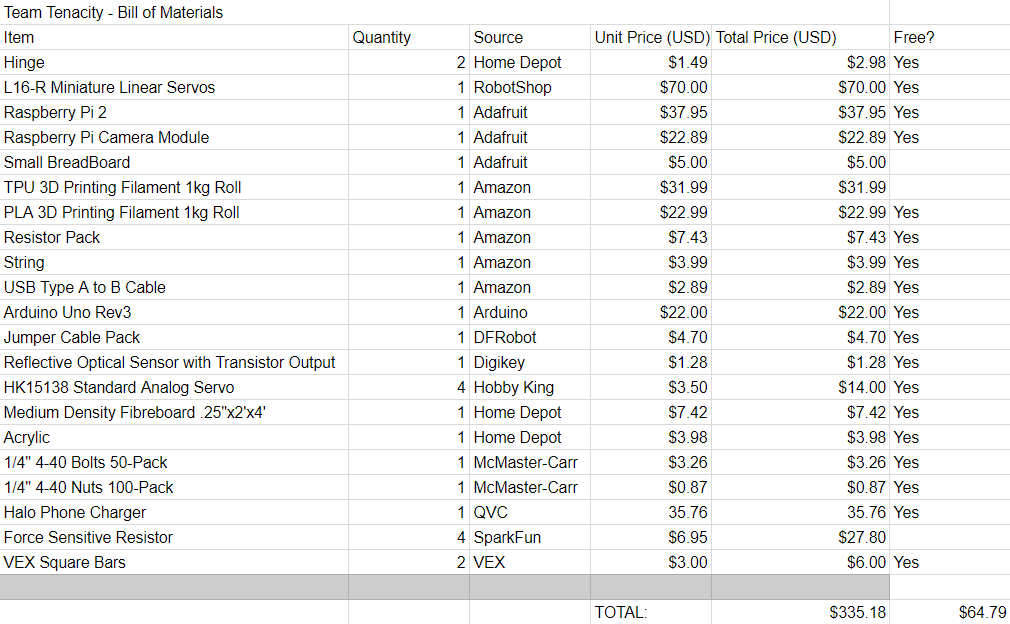
Materials